联系我们
联系我们

遨博机器人的示教编程过程讲解
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUBO机器人:
1、软件及工程下载
AUBO控制器软件下载地址链接 提取码:3937
AUBO虚拟机软件下载地址链接 提取码:2bkg
2、虚拟机安装说明
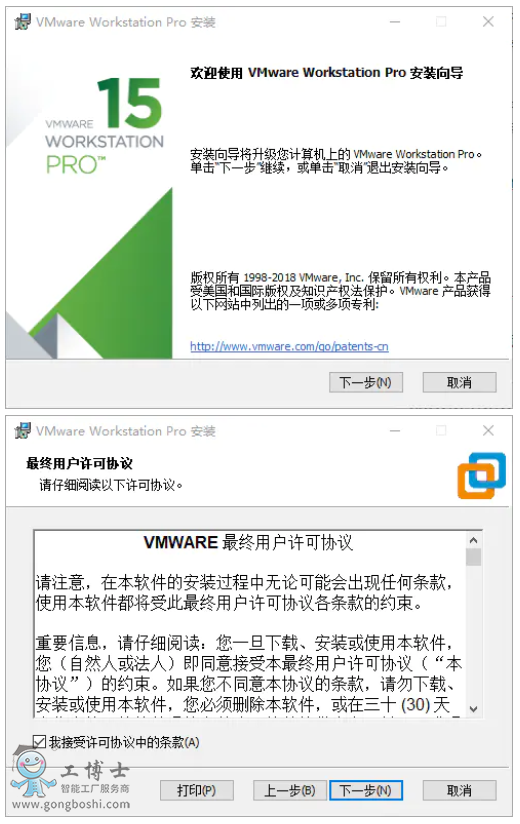
1、确保软件安装包,已经成功下载到电脑上,选择 ,进行安装。
,进行安装。
2、在***安装界面,直接点下一步,勾选接受协议,再点下一步。
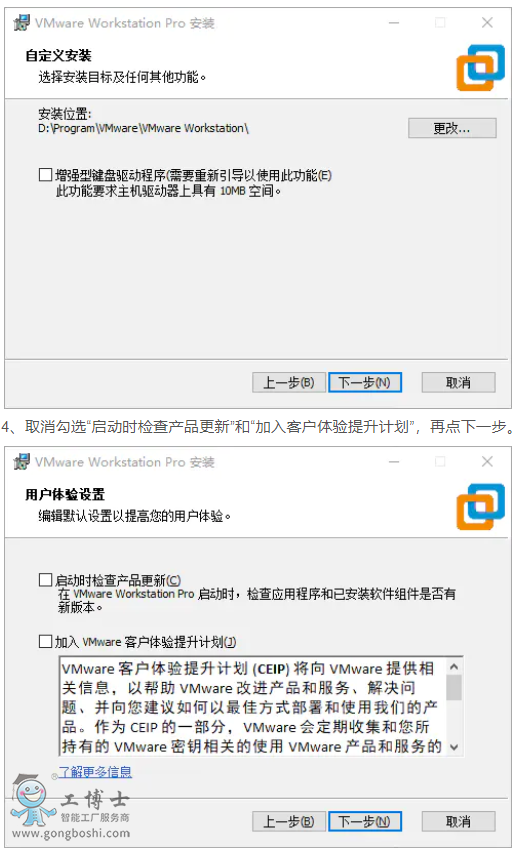
3、用户可以按需修改软件安装位置,勾选“增强型键盘驱动程序”,点击下一步
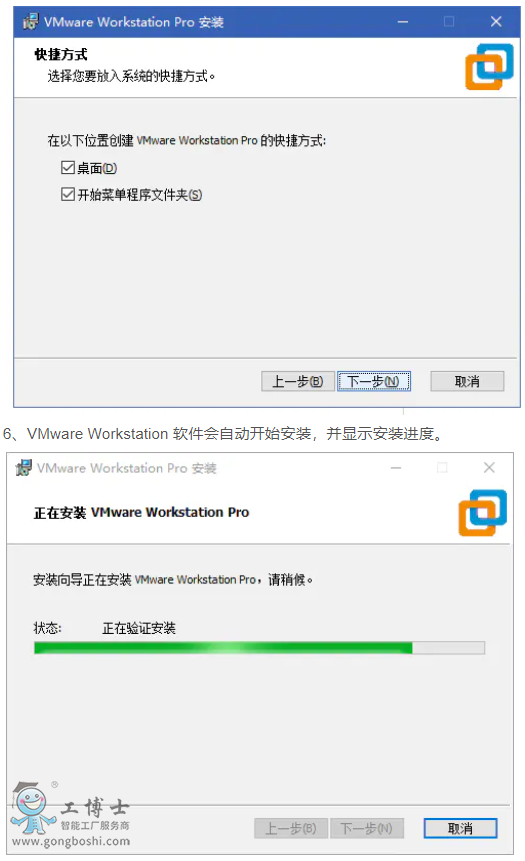
5、在快捷方式界面,直接点下一步,然后后选择底部的“安装”即可。
7、安装完成后,打开 ,再打开VM序列号,选择其中一个填入即可正常使用。
,再打开VM序列号,选择其中一个填入即可正常使用。
3、软件模拟仿真
虚拟机开启步骤说明点击链接
AUBO连接IOA步骤说明点击链接
首先连接到AUBO控制器,打开,

开启后界面

在使用虚拟机连接遨博机器人和IOA时,需要对IP地址进行设置(仅***次使用时需要)
先得到虚拟遨博机器人IP

配置VM虚拟机网络IP
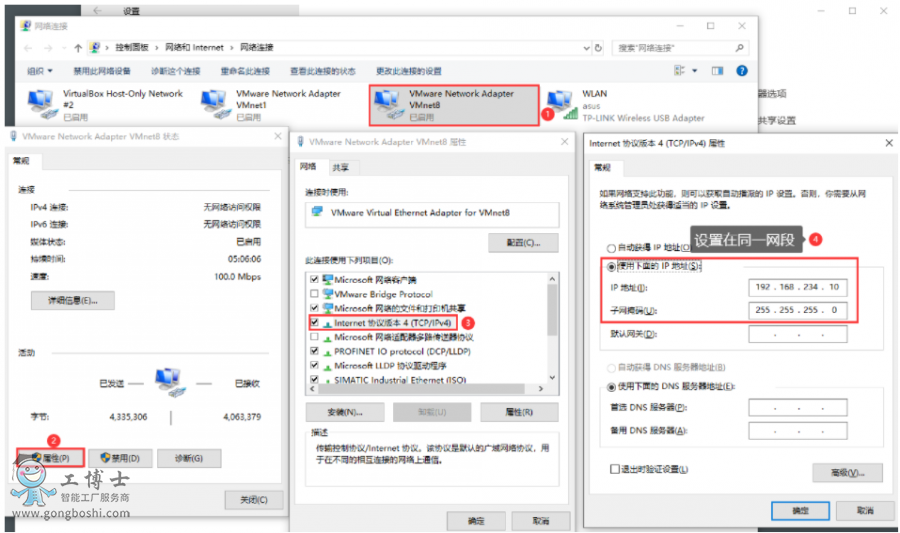
配置好后关闭

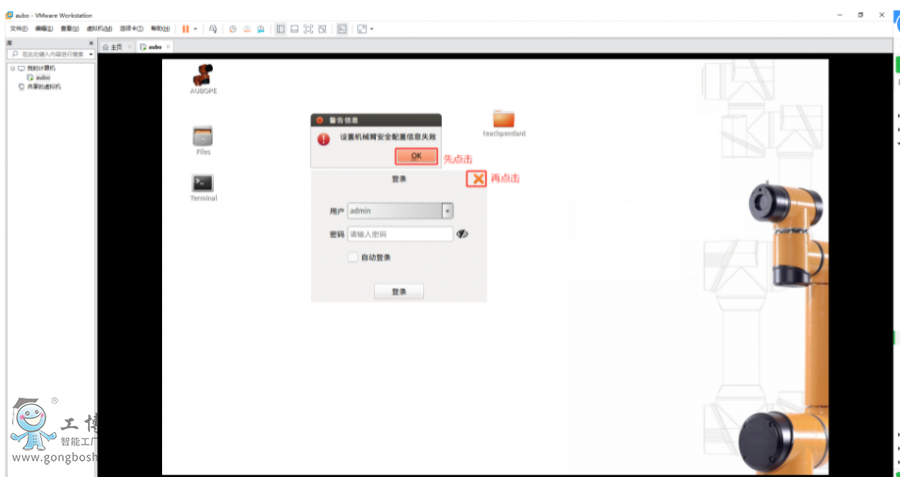
双击





开启完成

再次使用时跳过IP设置,直接如下图操作





开启完成

IOA虚拟工厂与虚拟遨博机器人连接步骤说明如下:
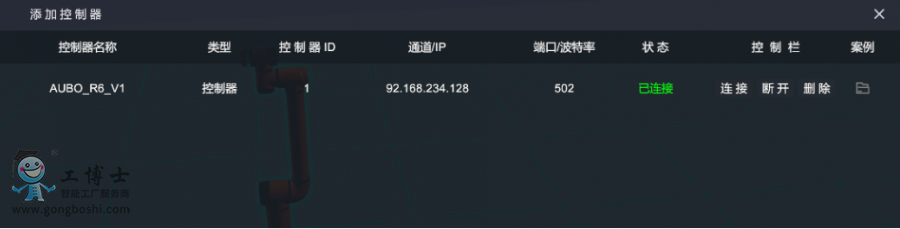
(1)添加遨博机器人虚拟控制器
在IOA虚拟工厂菜单栏中点击控制器添加-工业机器人-AUBO_R6_V1,添加一个遨博六轴机器人控制器。

(2)添加六轴机器人模型,并给机器人伺服配线
在IOA虚拟工厂里添加一台合适的六轴机器人模型,并且将AUBO_R6_V1的R6伺服配置给机器人的R6。
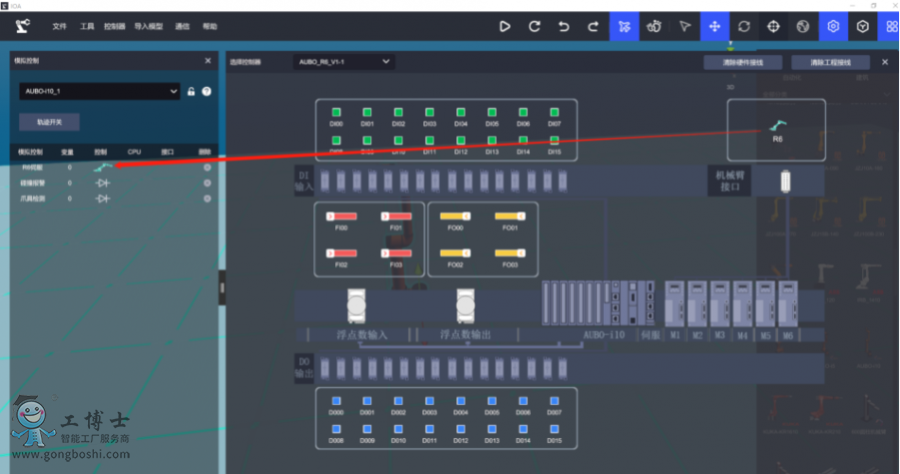
(3)打开遨博机器人相关虚拟软件,并与IOA进行连接
打开虚拟机VM软件,进入到在线编程界面。

在IOA控制器里进行连接,IP地址为192.168.234.128,端口502。